
Aseta Marlinin laiteohjelmisto ja saat sen toimimaan!
- Ensiaskeleet
- Seriaaliportit, Baudinopeus, Bluetooth, mukautettu nimi
- Siirtoajuri
- Sensoriton kohdistus
- Microstepping ja Stealthchop
- PSU-ohjaus
- Lämpötila-asetukset - Termistori ja Max/Min Temp
- PID-asetukset
- Turvallisuus - kylmäpuristus ja lämpökatkos
- Mekaaniset asetukset - Corexy, teippitulostin, robottivarsi
- Loppupysäytyksen asetukset
- Liikeasetukset - kiihtyvyys jne. myös yhdessä Linear Advance -toiminnon kanssa
- Z-anturi ja sängyn tasaus
- Sängyn koko
- M600
- Lisäominaisuudet - EEPROM, esilämmitysasetukset, suuttimen puhdistus, tulostustyön ajastin, salasana, kieli, SD-korttituki, kooderin herkkyys, kaiuttimet, LCD-näytöt, neopikselit
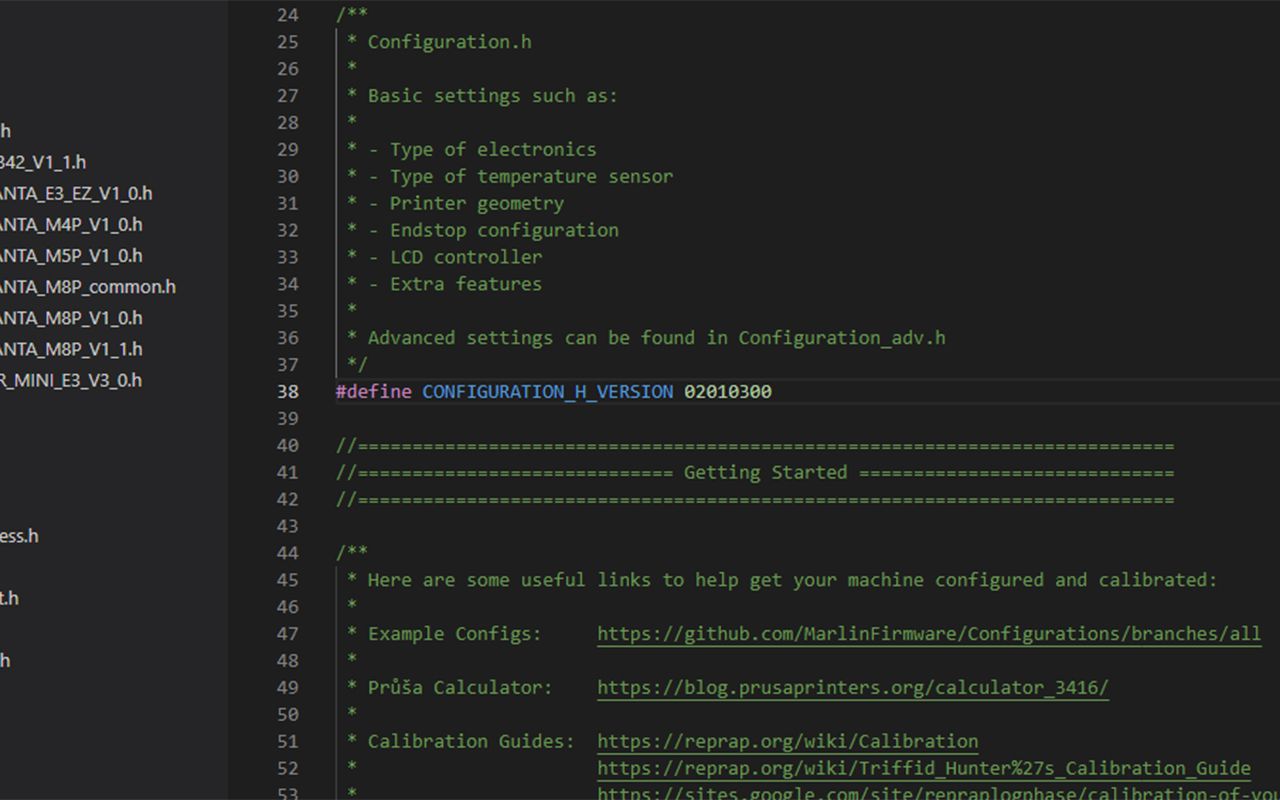
Pikainen huomautus ennen kuin aloitamme - mainitsen rivinumerot, jotta on helpompi löytää oikea firmware-rivi. Riippuen siitä, mitä firmwarea käytät tai mitä konfigurointitiedostoja käytät, tämä voi poiketa hieman, mutta se on silti suhteellisen helppo ratkaisu oikean rivin löytämiseksi.
Marlinissa lausekkeita kutsutaan myös määritelmiksi, ne voivat olla joko päällä, pois päältä tai päällä + valittavissa oleva arvo. Ne, jotka ovat päällä, ovat kommentoimattomia, eli niissä ei ole kommenttitunnusta, joka on kaksoisviivaus. Periaatteessa kaksoisviivamerkki kytkee kaiken pois päältä ja mahdollistaa kommenttien kirjoittamisen, jos haluat muokata firmwareasi niin, että se on käyttökelpoinen itsellesi tai muille myöhemmin. Firmware ei huomioi lainkaan mitään, mitä kirjoitetaan //-merkillä rivin alussa, kun se käännetään.
1. ensimmäiset askeleet
Marlinin laiteohjelmiston muokkaamiseen tarvitset oikean ohjelmiston. Vaikka vaihtoehtoja on muutamia, useimmat käyttäisivät Visual Studio Codea. Tämän ohjelmiston voi ladata täältä ilmaiseksi sekä Windowsille, Linuxille että Macille.
Tätä varten tarvitset myös Platform IO -laajennuksen. Kun VS Code on asennettu, siirry vasemmanpuoleisen työkalupalkin laajennuksiin (kuvake, jossa on neljä neliötä), etsi Platformio ja napsauta Asenna. Voit myös käyttää Auto-Build Marlin -laajennusta, joka nopeuttaa asioita hiukan, jos asetat levyllesi oikean prosessorin, mutta voimme tehdä tämän myös vanhalla tavalla. Näytämme myöhemmin tekstissä, miten se tehdään
Kun olet saanut kaiken kasaan, sinun on hankittava Marlinin firmware. Suuntaa siis osoitteeseen Marlin GitHub ja lataa uusin versio
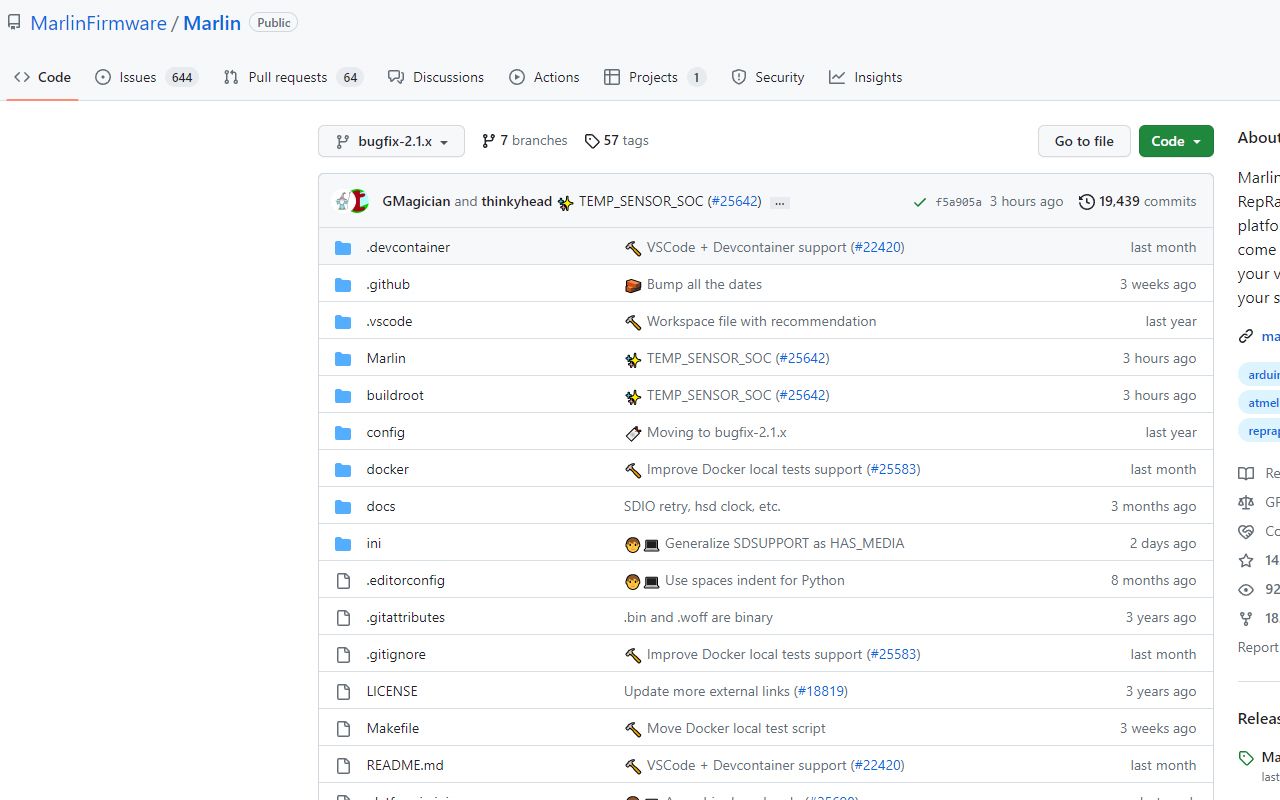
Huomaa, että on olemassa bug fix -versio ja tavallinen versio. Bug fix -versio sisältää uusimmat muutokset laiteohjelmistoon. Se on hyödyllinen, mutta myös vähiten vakaa, koska sitä työstetään jatkuvasti. Marlin-tiimi on kuitenkin erittäin hyvä tunnistamaan ja korjaamaan virheitä ja vikoja, joten käytämme mielellämme näitä versioita.
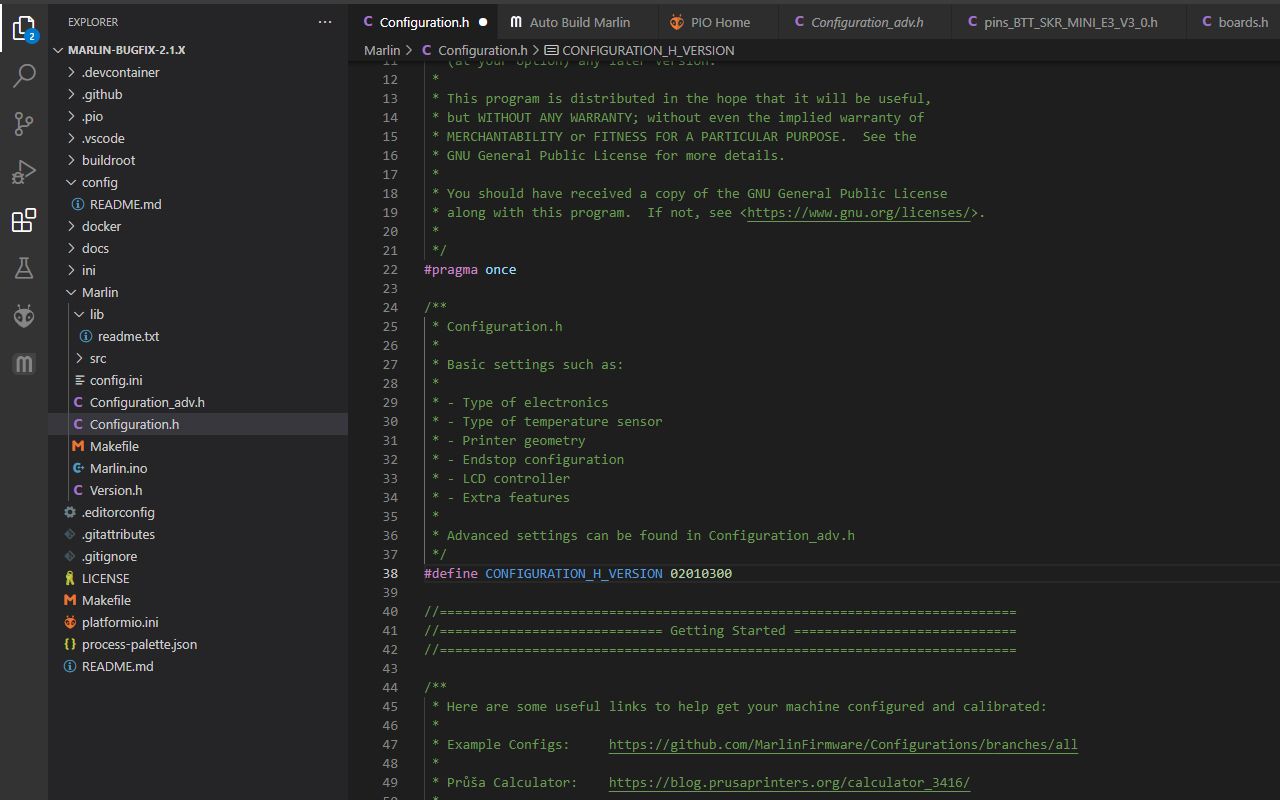
Klikkaa koodia oikeassa yläkulmassa ladataksesi laiteohjelmiston zip-tiedostona, pura zip-kansio ja lataa VS-koodi. Mene sitten tiedostoon ja avaa kansio ja Marlin firmware.
Seuraavana ovat konfiguraatiotiedostot, tulostimen erityiset konfiguraatiot löytyvät myös GitHubista.
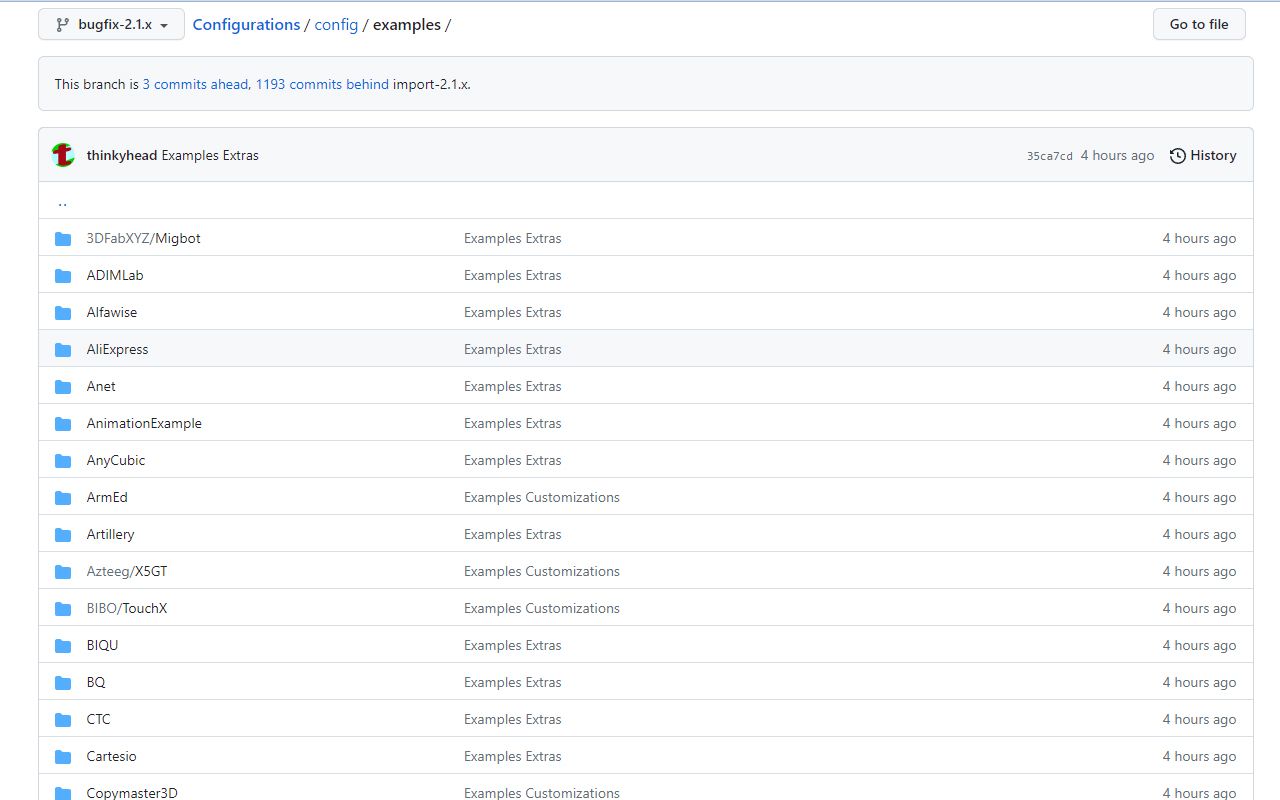
Nämä ovat erityisen hyödyllisiä, jos haluat muuttaa laiteohjelmistoa vain vähän. Jos sinulla on esimerkiksi tulostin, vaikkapa Ender 3, ja olet juuri päivittänyt hotendin ja haluat vaihtaa termistorin laiteohjelmistossa, voit yksinkertaisesti ladata kyseisen tulostimen konfigurointitiedostot ja liittää ne juuri lataamaasi Marlin-kansioon. Näin kaikki tulostimen oletusfirmaohjelmiston erityispiirteet ovat jo olemassa, ja sinun tarvitsee vain muuttaa termistorin arvoja.
Kun valmistelet laiteohjelmistokansiota muokkausta varten, on yksi erittäin tärkeä seikka, joka on otettava huomioon ennen kuin voit aloittaa muokkauksen, ja se on oikean emolevyn ja prosessorimallin valitseminen.
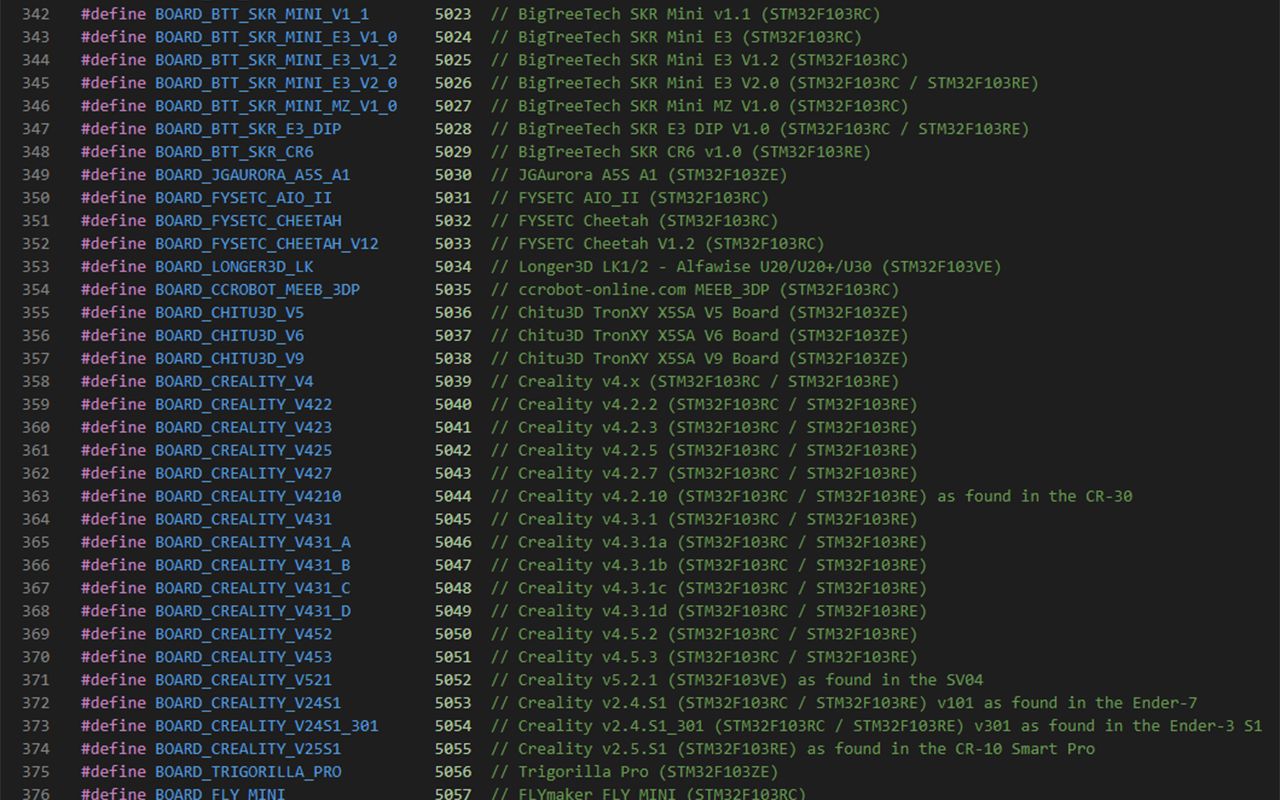
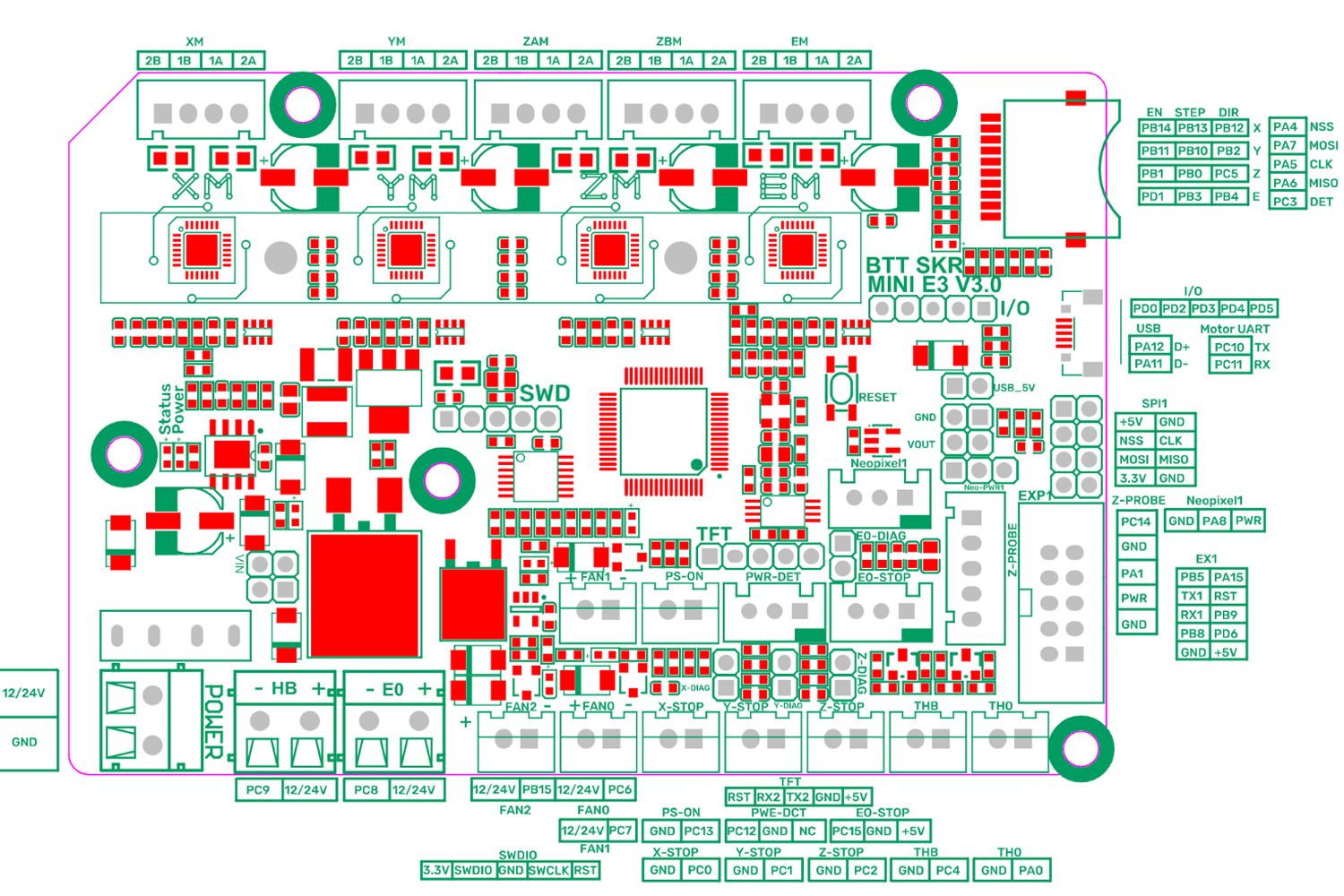
Jos menet vasemmalla puolella olevaan configuration.h-sivuun Explorerissa, näet rivillä 70 komennon, joka määrittää, mitä emolevyä käytetään. Monille emolevyille on vain yksi versio, mutta joissakin on variantteja tai jotkut tulostimet ovat käyttäneet aiemmin eri emolevyjä. On parasta avata tulostimesi ja tarkistaa, mikä emolevy on asennettu
Kaikkea piirilevyn nimi firmwaressa selviää, kun palaat takaisin vasemmalla olevaan exploreriin, menet kohtaan src, core ja boards.h. Tämä on luettelo kaikista Marlinin tukemista piirilevyistä. Paina sitten CTRL F ja kirjoita piirilevyn merkki, joten esimerkiksi Creality Ender 3 -piirilevyjen kohdalla kirjoita Creality. Selaa alaspäin ohittaaksesi kaiken, mikä liittyy kyseiseen avainsanaan, ja löydät Creality V4 -levyt. Voit käyttää vain nimeä Board_Creality_V4. Tämä on periaatteessa sama prosessi mille tahansa emolevymerkille, kunhan Marlinin kyseinen versio tukee sitä. Löydät myös prosessorivaihtoehdot tälle piirilevylle, version 4 piirilevyjen osalta näemme STM32F103RC:n ja STM32F103RE:n täällä.
Huomaa molemmat, palaa takaisin Configuration.h-tiedostoon ja kopioi levy #define MOTHERBOARDin jälkeiselle alueelle. Nyt voit myös mennä vasemmalla olevaan explorer-työkaluriviin ja klikata platform.io-välilehteä varmistaaksesi, että oikea prosessorimalli on default_envs-rivillä sivun yläreunassa
Okei, se siitä, nyt voimme muokata firmwarea. Muokkaamme kahta pääsivua, joista suurin osa on config.h:ssa, mutta osa myös config_adv.h:ssa.
2. Sarjaportit, Baudinopeus, Bluetooth, mukautettu nimi
Jos siirryt config.h:een, voimme aloittaa sieltä. Olemme jo valmiita emolevyn kanssa, joten siirrymme seuraavaan määritelmään: Sarjaportit.
Vähän jokainen tulostin käyttää sarjaporttia yhteyden muodostamiseen eri laitteisiin. Useimmissa tapauksissa käytetään vain yhtä, mutta jos kytket jotain muuta, kuten kosketusnäytön SD-kortilla tai USB-portilla, saatat joutua kokeilemaan hieman. Emme tee sitä tässä, joten unohdetaan se toistaiseksi.
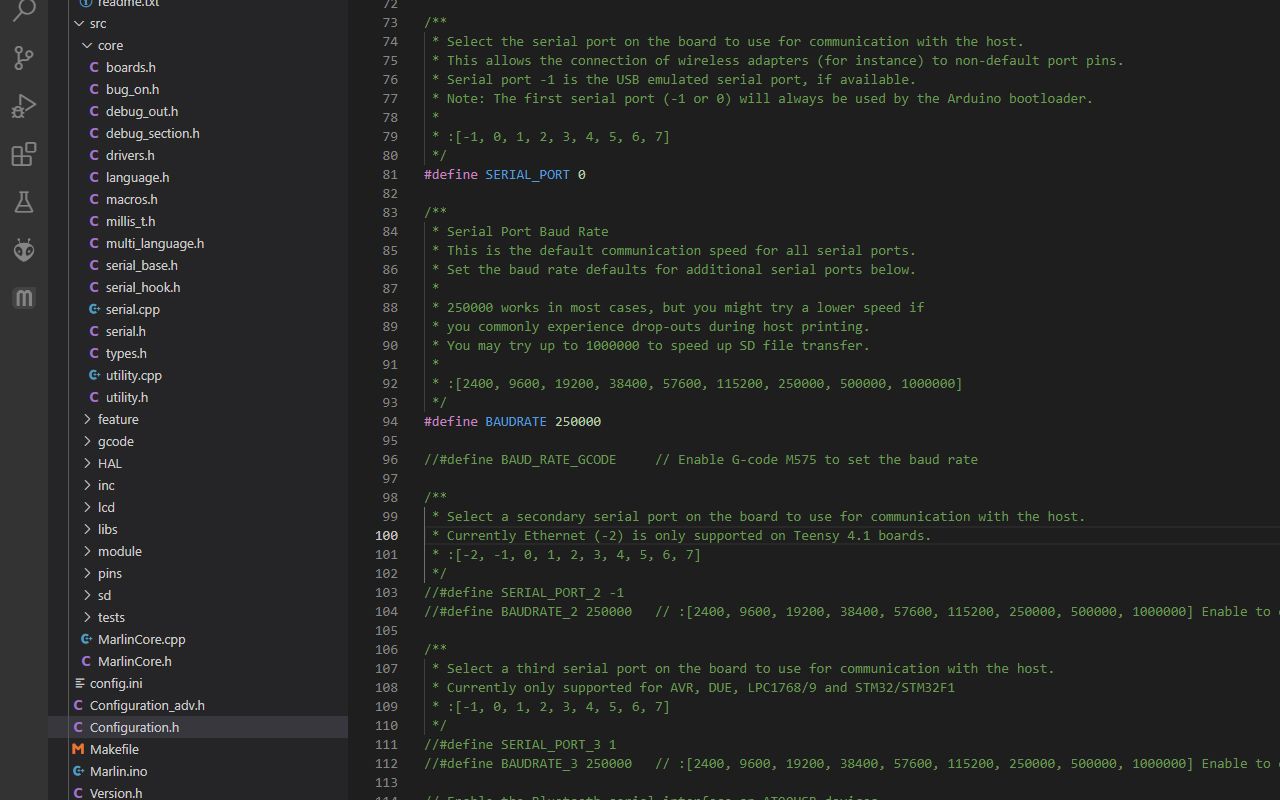
Baudnopeus on näiden porttien tiedonsiirtonopeus. Se voi vaihdella, mutta useimmat käyttävät baudinopeutta 115200.
Alhaalla on lisää sarjaporttivaihtoehtoja, mutta voimme jättää ne määrittelemättä, koska et todennäköisesti tarvitse ylimääräisiä sarjaportteja.
Baudnopeus on näiden porttien tiedonsiirtonopeus
Täällä on myös vaihtoehtoja Bluetooth-yhteydelle, joka on harvinaista tulostimissa, ja vaihtoehto tulostimen nimen muuttamiselle, joka on oletusarvoisesti pois päältä. Näet tämän nimen nestekidenäytössä, kun laite kytketään päälle. Ota vaihtoehto käyttöön ja anna uusi nimi, jos siltä tuntuu.
<3. stepper driver
Seuraavana vuorossa ovat askelmoottoriohjaimet. Kuulostaa vaikealta, mutta se ei ole sitä ollenkaan. Jokainen tulostin käyttää stepper-ajureita, ne ohjaavat moottoreita. Aiemmin tulostimissa käytettiin A4988:a tai muita vaihtoehtoja, jolloin moottorit olivat melko äänekkäitä. Nykyään TMC2208 tai TMC2209 on asennettu vakioajureiksi useimpiin tulostimiin. On kuitenkin olemassa useita muita ajureita, joilla on erilaisia ominaisuuksia ja etuja, kuten askeleen jakaminen, maksimivirta tai anturiton homing, jossa akseleiden homingiin ei tarvita fyysisiä rajakytkimiä.
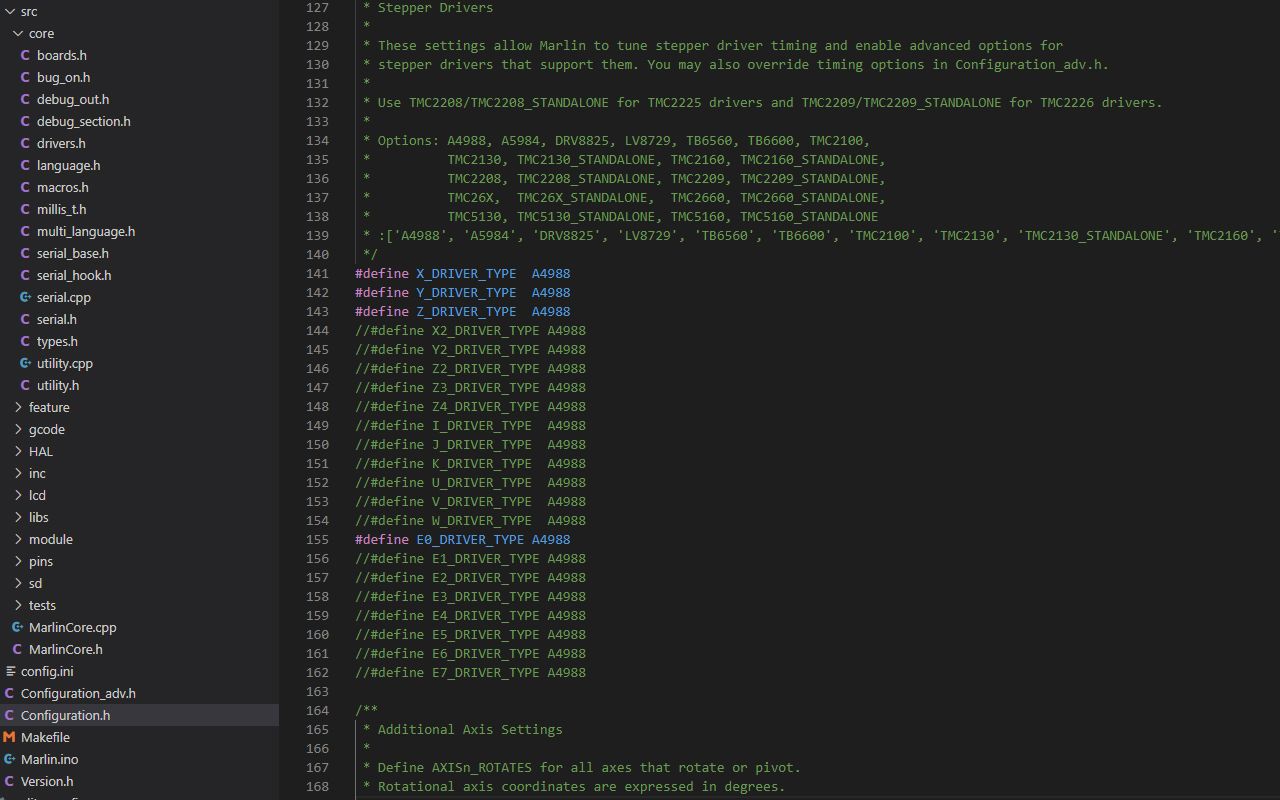
Voit helposti määrittää, mitä ohjainta haluat käyttää mihinkin pääsyyn. Usein tulostimen emolevyllä ei määritetä, mitä askellusajureita käytetään. Joskus piirilevy käyttää sisäänrakennettuja askelmoottoriohjaimia, jolloin niitä ei voi poistaa. Tällöin ei todennäköisesti ole ilmoitettu, mitä ohjainta käytetään, mutta joskus emolevyllä on merkki, joka voi osoittaa, mitä ohjainta käytetään. Esimerkiksi Creality V4 -levyillä on SD-kortin liittimessä pieni koodi. Jos siinä lukee "T8", se tarkoittaa, että käytössä on TMC2208-ohjain. Joissakin emolevyissä käytetään irrotettavia ajureita, minkä etuna on se, että voit helposti vaihtaa ne, jos niihin tulee vika - jos näin käy integroitujen ajureiden kanssa, emolevy on pilalla ja tarvitset uuden.
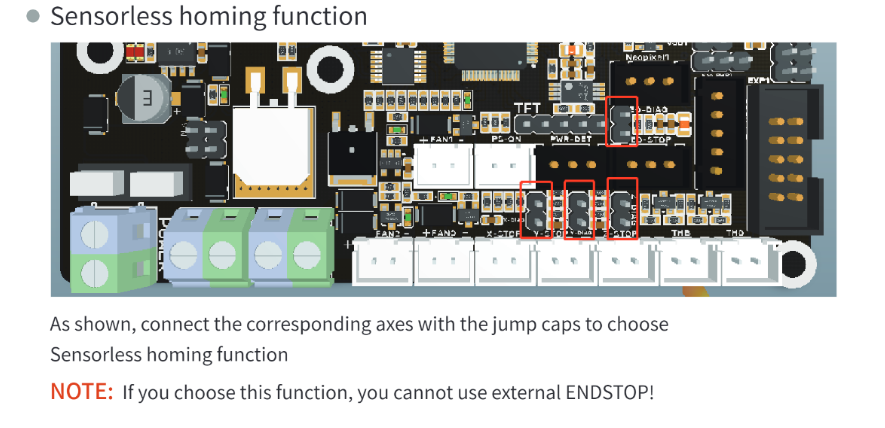
4. Sensoriton kohdistus
Pidän todella paljon sensorittomasta homingista. Se ei ole yhtä tarkka kuin fyysiset päätepysäkit, mutta se vähentää kaapeleiden tarvetta, ja vihaan kaapeleita. Kaikki ohjaimet eivät tue anturitonta homingia, esimerkiksi erittäin suositut TMC2208-ohjaimet eivät voi käyttää tätä ominaisuutta. TMC2209-ajurit sen sijaan voivat.
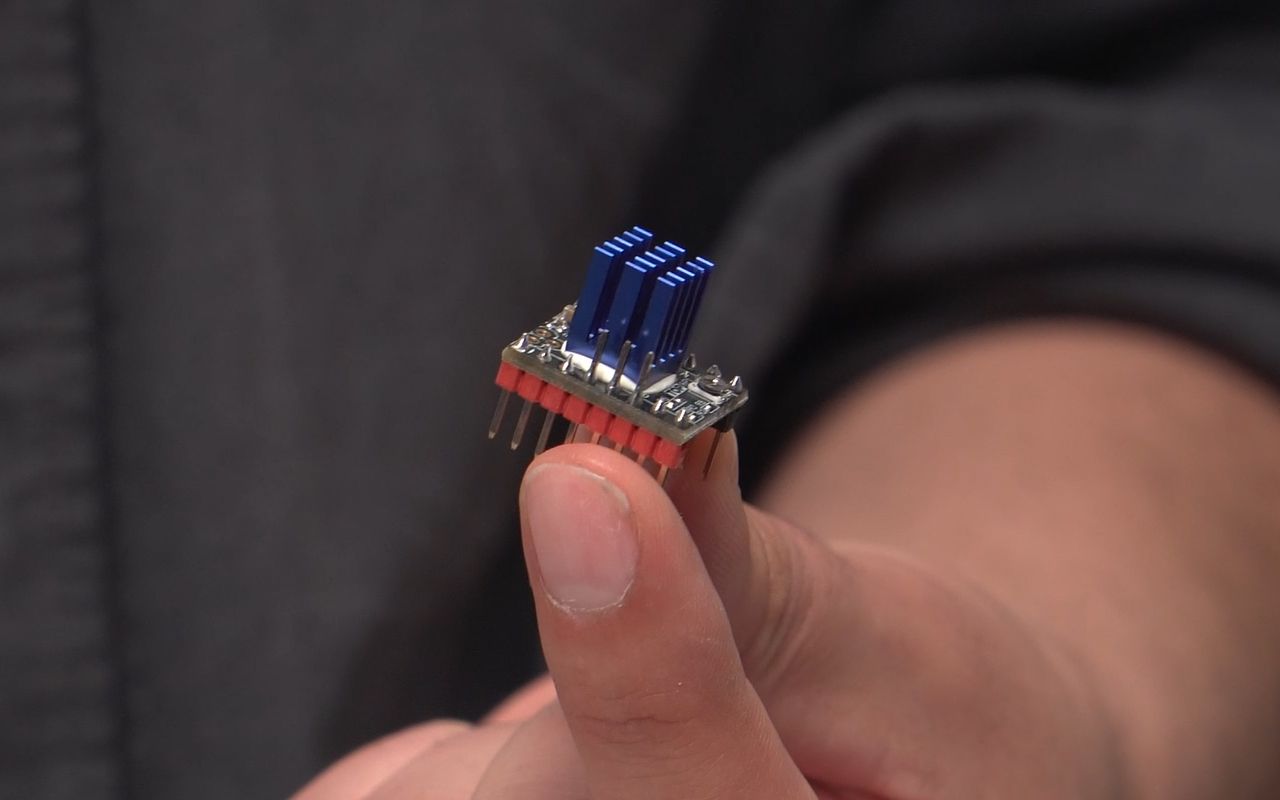
Tunnistimettoman homingin saamiseksi toimimaan tarvitaan joitakin fyysisiä muutoksia emolevyyn, mutta ei hätää, ne ovat todella yksinkertaisia. Tämä voi vaihdella emolevystä riippuen, mutta yleensä kyse on yksinkertaisesti hyppääjien asettamisesta tiettyihin nastoihin. Katso SKR Mini E3:n käyttöopas.
Firmwarea ajatellen, tässä on mitä tarvitaan sensorittoman homingin saamiseksi: Ensinnäkin HOMING_BUMP on asetettava 0:ksi rivillä 210 (configuration_adv.h) - tätä käytetään tavallisesti päätepysäytyksiin, joissa akseli osuu päätepysäytykseen, liikkuu hieman taaksepäin ja osuu sitten hitaasti uudelleen päätepysäytykseen. Oletusarvoisesti tämä on muutama millimetri, meidän on kytkettävä se pois päältä.
Rivillä 1174 ENDSTOP_INTERRUPTS_FEATURE (configuration.h) on oltava undefined.
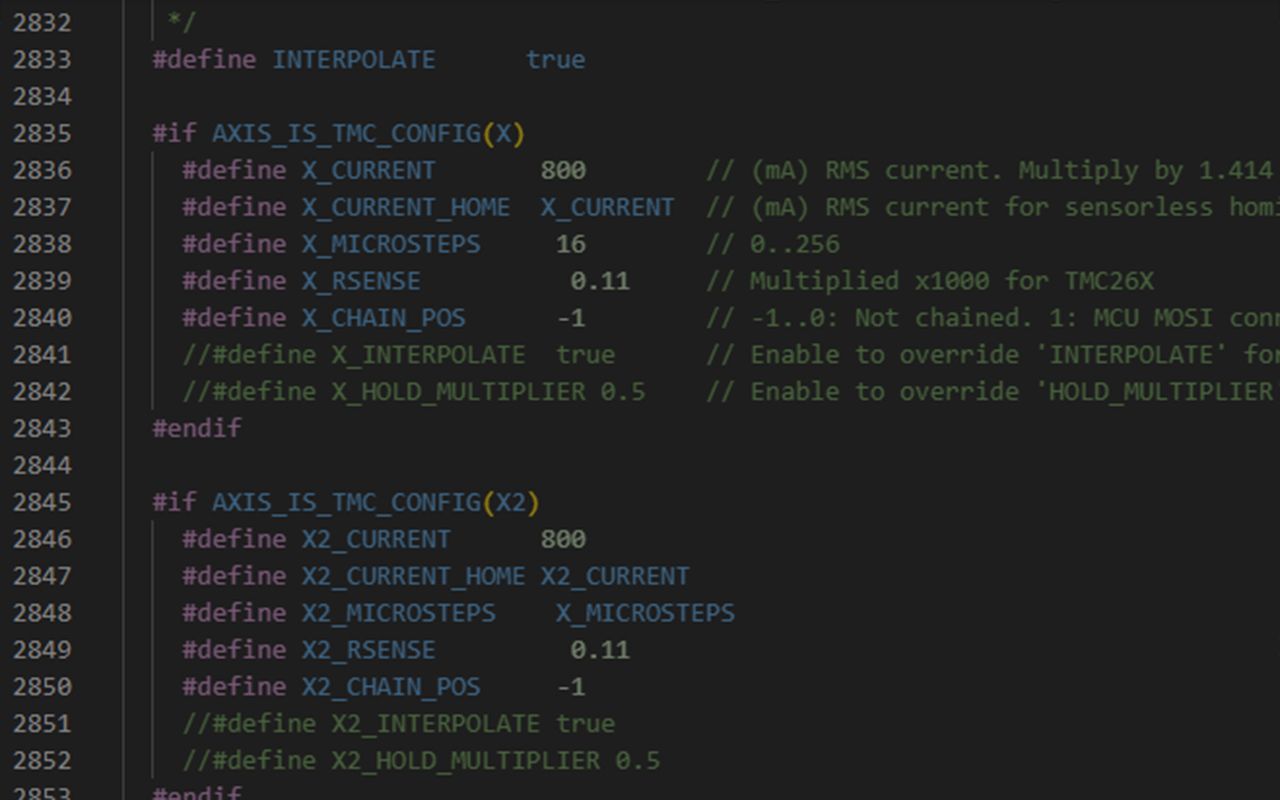
Seuraavana on virta. Näissä emolevyissä on se hyvä puoli vanhempiin verrattuna, että vanhojen 8-bittisten emolevyjen moottorin virtaa ei voinut muuttaa firmwarella. Vref:tä piti muuttaa emolevyllä kääntämällä pientä trimmipottia, joka oli hyvin herkkä. Käännä sitä hiukan liikaa ja se lentää 1,5:een, vaikka tarvitset vain 0,8 (tai 800 mA) useimmille xy-moottoreille. Virran asettamiseen tarvittavat rivit löytyvät 2386:sta (configuration_adv.h).
Ohjelmistossasi tarvitsemasi virta riippuu askelmoottoriohjaimesta ja moottorista. Jos sinulla on melko keskimääräinen moottori, kuten 42-34-moottori, virran arvon tässä tarvitsee olla vain 800. Jos löydät moottorisi tekniset tiedot, saatat nähdä, että maksimivirta on 1,5A tai 1500mA. Älä kuitenkaan syötä 1500:aa laiteohjelmistoon, sillä se on absoluuttinen huippuarvo, emmekä työskentele huippuarvojen kanssa, sillä se päättyisi huonosti. Etsimme RMS-arvoa, virran neliöjuurikeskiarvoa. Oikean virran laskeminen ei oikeastaan ole niin helppoa, mutta on olemassa laskureita, kuten tämä ALL3DP:ltä.
Virranhallinta on ratkaisevan tärkeää, kun kalibroit anturitonta homingia, sillä saatat joutua näpyttelemään sitä hieman varmistaaksesi, että se toimii optimaalisesti.
MONITOR_DRIVER_STATUS sijaitsee rivillä 3204 (configuration_adv.h) - tämä tarkistaa ajurit säännöllisesti määrittääkseen niiden tilan. Marlin voi automaattisesti vähentää ohjaimen virtaa, jos ohjain ilmoittaa ylilämpövaroituksesta. Ota tämä siis käyttöön.
Voit myös ottaa TMC_DEBUG:n käyttöön rivillä 3317 (configuration_adv.h), jolloin näet lisätietoja askelmittariohjaimista.
Okei, nyt voimme kytkeä päälle SENSORLESS_HOMING rivillä 3272 (configuration_adv.h), meidän täytyy kytkeä tämä päälle X:lle ja Y:lle ja asettaa sakkausherkkyys, tämä on kuinka herkästi ajurit voivat mitata sakkauksen, eli kun moottori siirtää tulostuspäätä akselinsa toiselle puolelle ja osuu päähän. Jos se on liian alhainen, se ei havaitse mitään ja jatkaa moottorin pyörittämistä, vaikka tulostuspää osuisi sivulle, jos se on liian korkea, se "havaitsee" sakkauksen koko ajan, vaikka tulostuspää vain istuisi siinä. Kun laiteohjelmisto on flashattu, LCD-näytöllä on nyt valikko, jossa voit muuttaa sakkausherkkyyden ja virran arvoja, joten sinun tarvitsee vain muuttaa arvoja, jotta se sopii. Pysäytysherkkyyden arvot vaihtelevat välillä 0-255, joten ensimmäisellä yrittämällä pitäisi olla keskellä 128:n tienoilla. Säädä arvoa vastaavasti ja yritä sitten uudelleen ja uudelleen ja uudelleen. Jos jäät jumiin, ja valitsemastasi arvosta riippumatta se ei vain toimi, sinun on säädettävä ampeerilukua, lisää sitä vain hieman. VAIN VÄHÄN!!! Jos se on 800 milliampeeria, nosta se 850:een ja yritä uudelleen.
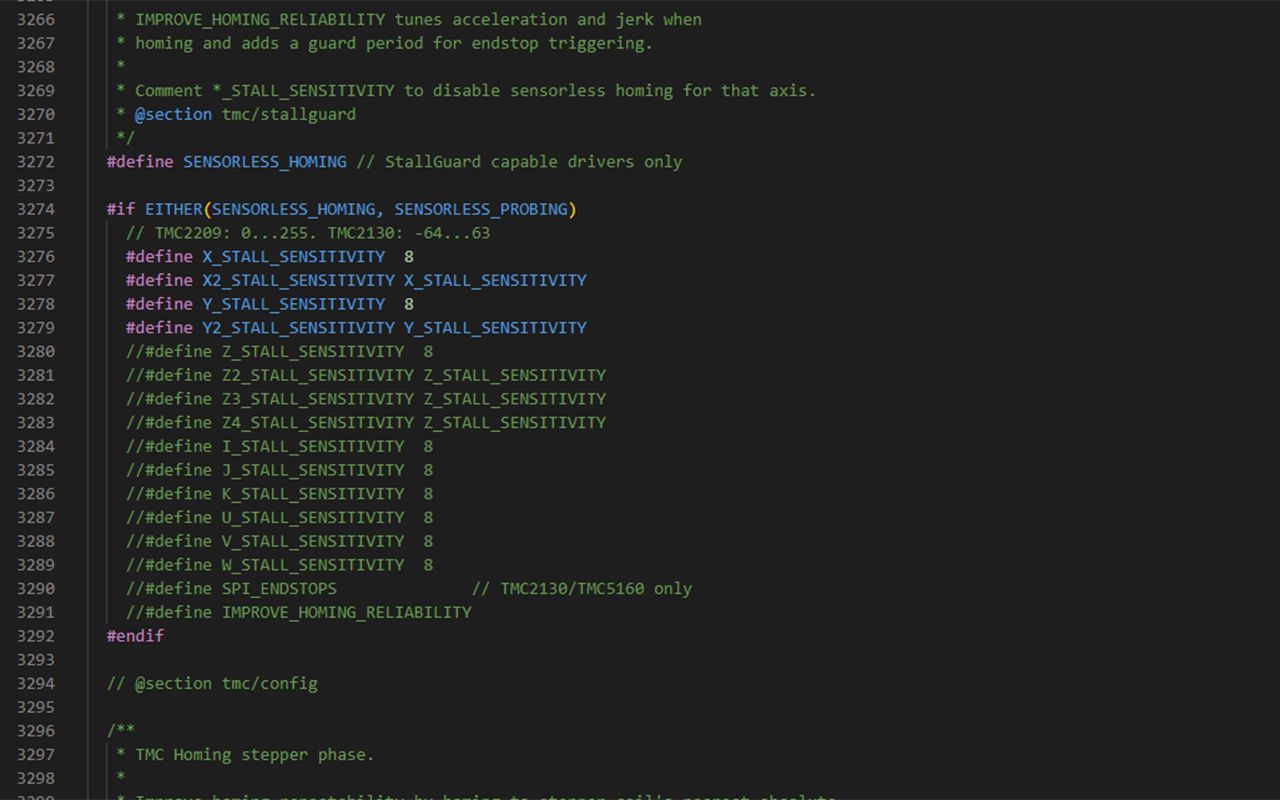
Voit myös käyttää define IMPROVE_HOMING_RELIABILITYä hieman alempana rivillä 3291, joka on juuri sitä, miltä se kuulostaa.
Jos ihmettelet, anturiton homing Z-akselilla on hankalaa, erityisesti tulostimissa, jotka käyttävät karoja Z-liikkeeseen, kuten useimmat tulostimet tekevät. Voit säästää itsesi tältä ongelmalta ottamalla Z-akselin anturittoman homingin pois käytöstä.
5. Mikroaskellus ja Stealthchop
Rivillä 2838 on toinen ajurifunktio X_MICROSTEPS (configuration_adv.h). Askelmoottoriohjaimet liikkuvat askelin, yleensä 1,8 astetta askelta kohti, mikä on hyvin tarkkaa, mutta voiko tämä olla vielä tarkempi? Sen lisäksi, että hankit toisen moottorin, jolla on pienempi mittaus askelta kohti, voit käyttää mikroaskeleita, jotka käskevät ajurin antaa moottorille signaalin liikkua vähemmän kuin 1,8 astetta, mikä on varsin kätevää erittäin tarkkaa asetusta varten. Oletusarvo on 16, mutta voit mennä korkeammalle, mikä tarkoittaa tietenkin sitä, että myös moottorin tietyn matkan siirtämiseen tarvittavien askelten määrä muuttuu. Siksi Marlinissa on tämä ihana funktio nimeltä Interpolate rivillä 2833 (configuration_adv.h), joka, jos asetat sen arvoksi true, "interpoloi" automaattisesti jokaisen moottorin askelarvon, joten sinun ei tarvitse muuttaa mitään manuaalisesti. Jos siis muutat mikroaskeleen 16:sta 32:een, sinun on säädettävä kaikkien moottoreiden askeleet, jotta saavutat uuden arvon. Jos aktivoit interpoloinnin, tämä tapahtuu automaattisesti
Seuraava kohta on STEALTHCHOP rivillä 3140 (configuration_adv.h). Ota tämä käyttöön, se tekee kaikesta superhiljaa - kannattaa myös tarkistaa CHOPPER_TIMING CHOPPER_DEFAULT heti sen alapuolella. Sinulla on todennäköisesti 24 V:n tulostin, joten aseta se 24 V:ksi. Stealthchopin käyttömahdollisuus riippuu tietysti myös ajuristasi, mutta onneksi useimmat osaavat sen nykyään.
6. Virtalähteen ohjaus
Takaisin Configuration.h-tiedostosta riviltä 388 löytyy PSU-ohjaus (configuration.h), joka voi olla mielenkiintoinen, jos haluamme sammuttaa tulostimen automaattisesti tulostustyön päätyttyä.
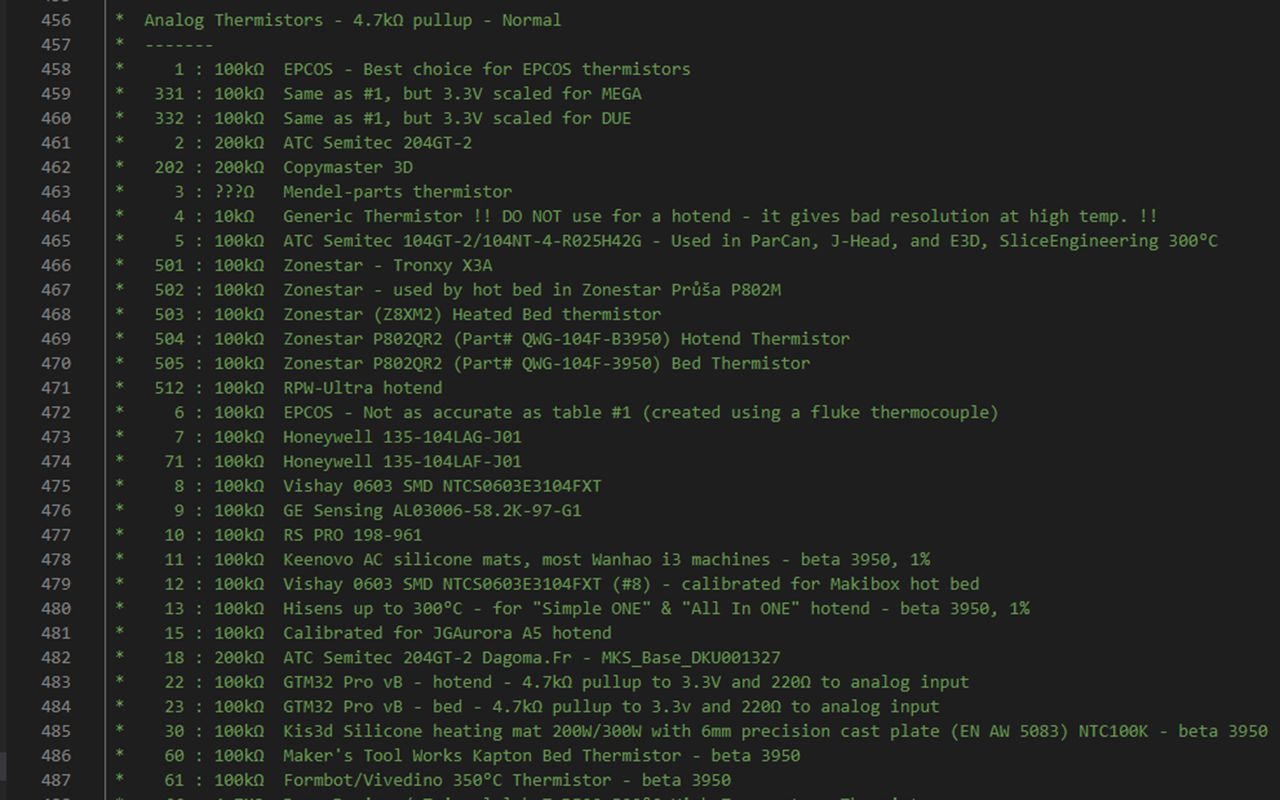
7. Lämpötila-asetukset - termistori ja Max/Min Temp
Seuraavana vuorossa ovat lämpöasetukset rivillä 430 (configuration.h), ja tämä on luultavasti kaikkein kysytyin firmware-opas kaikista. Monille ihmisille Hotend-päivitys on ensimmäinen muutos, jonka he tekevät. Jos sinulla on Ender 3 ja haluat päivittää Revo-hotendiin, mitä teet? No, on kaksi muutettavaa asiaa, joista ensimmäinen on termistori. Useimmissa tulostimissa käytetään 100 k:n termistoria, jonka anturityyppi Marlinissa on "1". Revossa ja monissa muissa termistoreissa käytetään kuitenkin numeroa 5, joka on myös 100 k:n termistori, mutta Semiteciltä. Kuten näet, on olemassa muutamia merkkejä, jotka käyttävät tämän tyyppistä termistoria. Mutta ehkä haluat päivittää johonkin vahvempaan, kuten PT1000:een? Se riippuu PT1000:stä, mutta useimmat käyttävät anturia numero 1047, jossa on 4,7 ohmin pull up.
Voit tehdä saman temp_sensor_bedille rivillä 536 (configuration.h).
Toinen osa kuumennuspäätteen päivitystä on HEATER_0_MAXTEMP rivillä 611 (configuration.h). PTFE-kuumennin on yleensä rajoitettu 260 C:een, joka Marlinissa ilmoitetaan 275 C:ksi. En ole varma, miksi näin tehtiin, mutta riippumatta siitä, minkä lämpötilan laitat tähän, tulostimesi todellinen saavutettavissa oleva lämpötila on 15 C alhaisempi. Jos sinulla on siis 300 C:n kuuma pää, enimmäisarvoksi on annettava vähintään 315 C.
Rivillä 597 on myös HEATER_0_MINTEMP, joka sammuttaa lämmittimen automaattisesti, kun se saavuttaa tämän lämpötilan. Muuten, jos tulostimesi sammuttaa lämmittimen tai näyttää mintemp-virheen etkä ole varma, miksi, se voi johtua siitä, että tulostimesi on liian kylmässä ympäristössä. Talvella saamme paljon kysymyksiä tästä, koska monet pitävät tulostimia autotallissa, ja näin voi helposti käydä.
Hyvä on, että tulostin on liian kylmä
Rivillä 623 sinulla on terminen yliohjaus (configuration.h), joka sallii maxtemp-arvon ylittävän lämpötilan ennen kuin se sammuttaa koneen. Ylitys voi tapahtua, jos lämmitintäsi ei ole kalibroitu, mikä johtaa meidät riville 633 ja PID-viritykseen (configuration.h)
8. PID-asetukset
Tällä synkronoidaan lämmitin ja termistori niin, että lämmitys on tarkka. Tärkeintä tässä on rivi 659, jossa annetaan oletusarvot proportionaaliselle, integraaliselle ja derivaatalle. Sinun ei oikeastaan tarvitse muuttaa mitään tässä kohtaa, mutta kun vaihdat lämmittimiä, on hyvä idea tehdä PID-viritys, joka lähinnä kalibroi lämmittimen tai termistorin niin, että lämpötila ei vaihtele liikaa tulostimen ollessa käynnissä. Suosittelen siis tämän tekemistä Hotend-päivityksen jälkeen. Tähän on useita tapoja, mutta yksi helppo tapa on ottaa tämä käyttöön LCD-valikossa rivillä 803. Toinen tapa olisi liittää tulostin tietokoneeseen USB:n kautta ja käyttää pääteohjelmaa, kuten Pronterface.
Tässä terminaalissa voit syöttää gcode-komentoja. Oikea komento PID-viritystä varten on "M303 E0 S210 C10 U".
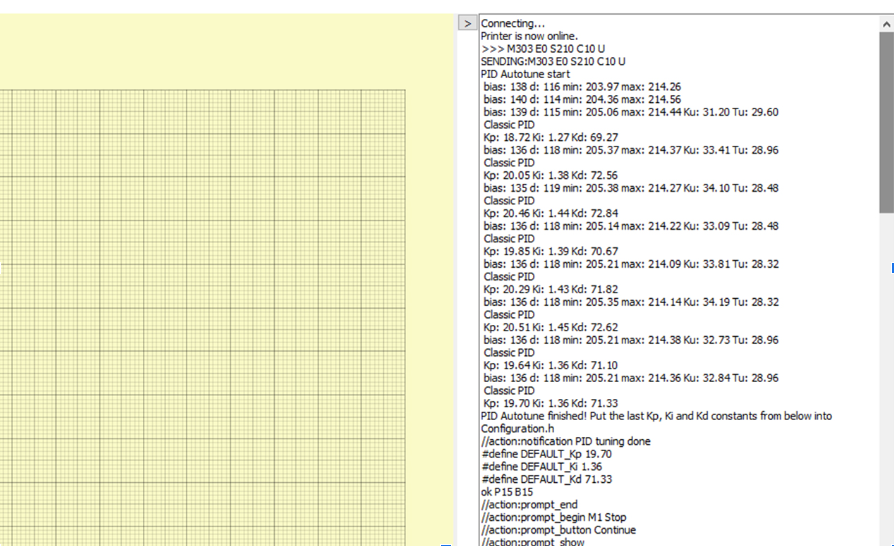
Tässä M303 on komento äänestysprosessin käynnistämiseksi.
E0 viittaa käytettyyn lämmittimeen (E0 on oletusasetus lähes kaikissa yhden ekstruuderin tulostimissa).
S210 viittaa lämpötilaan 210C, joka sopii PLA:lle, mutta voit muuttaa sitä, jos haluat käyttää pääasiassa muita filamentteja.
C7 osoittaa, kuinka usein testi suoritetaan. Mitä useammin testi ajetaan, sitä tarkempi se on, mutta olemme havainneet, että enintään 7 yritystä on tarpeen.
Testi voidaan ajaa niin monta kertaa kuin haluat
Kun olet syöttänyt tämän komennon, testi suoritetaan ja Kp-, Ki ja Kd-arvot syljetään ulos.
Kun olet saanut nämä arvot, voit syöttää ne päätelaitteeseen M301-komennolla, esimerkiksi M301 P30 I3 D60.
P301 P30 I3 D60
Tallenna sitten asetukset M500-komennolla, ja olet valmis.
Tallenna asetukset M500-komennolla, ja olet valmis
PID-säätöön ja asumiseen liittyy muutakin. Sängyn PID-asetus ei ole yhtä tarpeellinen kuin kuumennuspisteen PID-asetus. Hotendit vaihdetaan paljon useammin kuin sängyn termistori, mutta se on siellä, kun se pitää kytkeä päälle.
<9. Turvallisuus - kylmäpuristus ja terminen karkaaminen
Seuraava tärkeä asia on rivillä 827 (configuration.h) oleva lämpökarkulaisuussuojaus, joka kannattaa ehdottomasti kytkeä päälle! Tämä sammuttaa tulostimen, jos lämpötila nousee yli odotetun tason. Ehkä termistori on siirtynyt, etkä tiedä sitä. Ilman sitä lämpötila nousee jatkuvasti ja termistorin arvo tuskin muuttuu. Tämä on huono asia. KYTKE SE PÄÄLLE!
Rivillä 816 (configuration.h) on myös toiminto, jolla estetään kylmäpuristus. Tämä estää suulakepuristimen moottorin aktivoitumisen, kun lämpötila on alle syötetyn arvon. Oletusarvoisesti tähän asetetaan arvo 170. Tulostimessasi normaalisti käyttämäsi filamentti kertoo, mitä arvoa tässä tulisi käyttää. Jos esimerkiksi tulostat pääasiassa PETG:tä, lämpötilaksi on asetettava noin 220 C:n lämpötila <10. Mekaaniset asetukset - corexy, nauhatulostin, robottivarsi
Seuraavaksi tulevat mekaaniset asetukset, ja koska käytämme Corexy-asetusta, tämä on erittäin tärkeää. Tässä meidän on määritettävä Corexy.
Tässä on muitakin kinematiikoita, kuten delta, nauhatulostin tai jos sinulla on robottivarsi, tämä on myös mahdollista.
11. Lopetusasetukset ja lopetuskohinan kynnysarvo
Seuraavaksi tulevat lopetusasetukset rivillä 1071 (configuration.h). Tässä yksinkertaisesti aktivoidaan päätepysäytykset.
Tässä on toinen pieni funktio Endstop Noise Threshold. Kauan sitten jouduin käyttämään tätä funktiota, kun halusin kiinnittää tulostimeen erittäin pitkiä kaapeleita, jotta kaikki elektroniikka olisi kotelon ulkopuolella. Jostain syystä pitkät kaapelit aiheuttivat virheiden havaitsemisen kotiutuksen aikana, mutta tämä toiminto pelasti päiväni.
12. Liikeasetukset - Kiihtyvyys, askeleet, syöttönopeus, nykäys, liitospoikkeama, lineaarinen eteneminen
Seuraavana ovat liikeasetukset osoitteessa 1194 (configuration.h) ja aivan ensimmäisenä ovat oletusaskeleet. Kuten aiemmin mainittiin, askelmoottorit pyörivät askelin 1,8 asteen välein (ellei sinulla ole 0,9 asteen moottoria). Kun moottori pyörittää hihnaa, lyijyruuvia tai hammaspyörää, sen on otettava tietty määrä askelia, jotta osa liikkuu halutun määrän. Useimmiten tätä on muutettava ekstruuderin päivityksissä, joissa sinun tarvitsee oikeastaan vain muuttaa tämän rivin numeroa. Yleensä valmistajat antavat ekstruuderin askeleet (tai esteps), mutta niitä voi olla tarpeen säätää, joten teemme esteps-kalibroinnin. Tästä on paljon videoita.
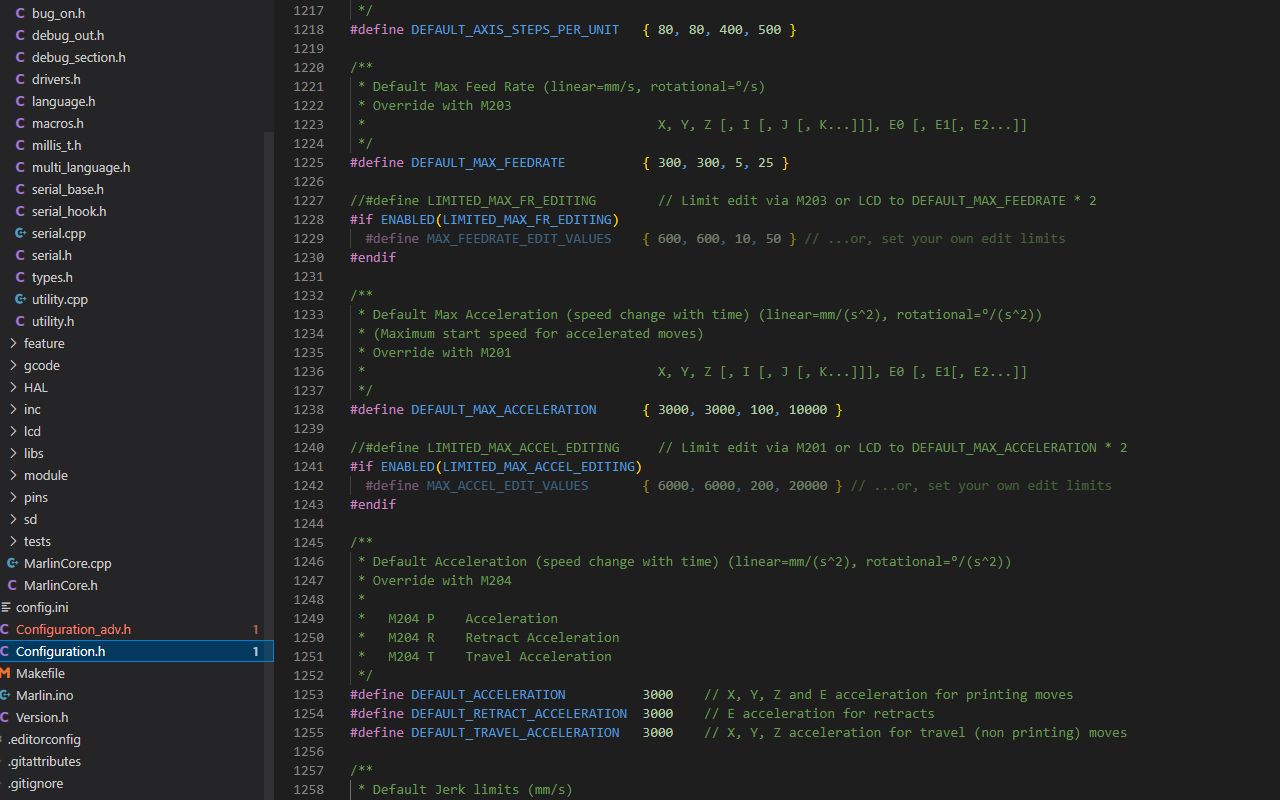
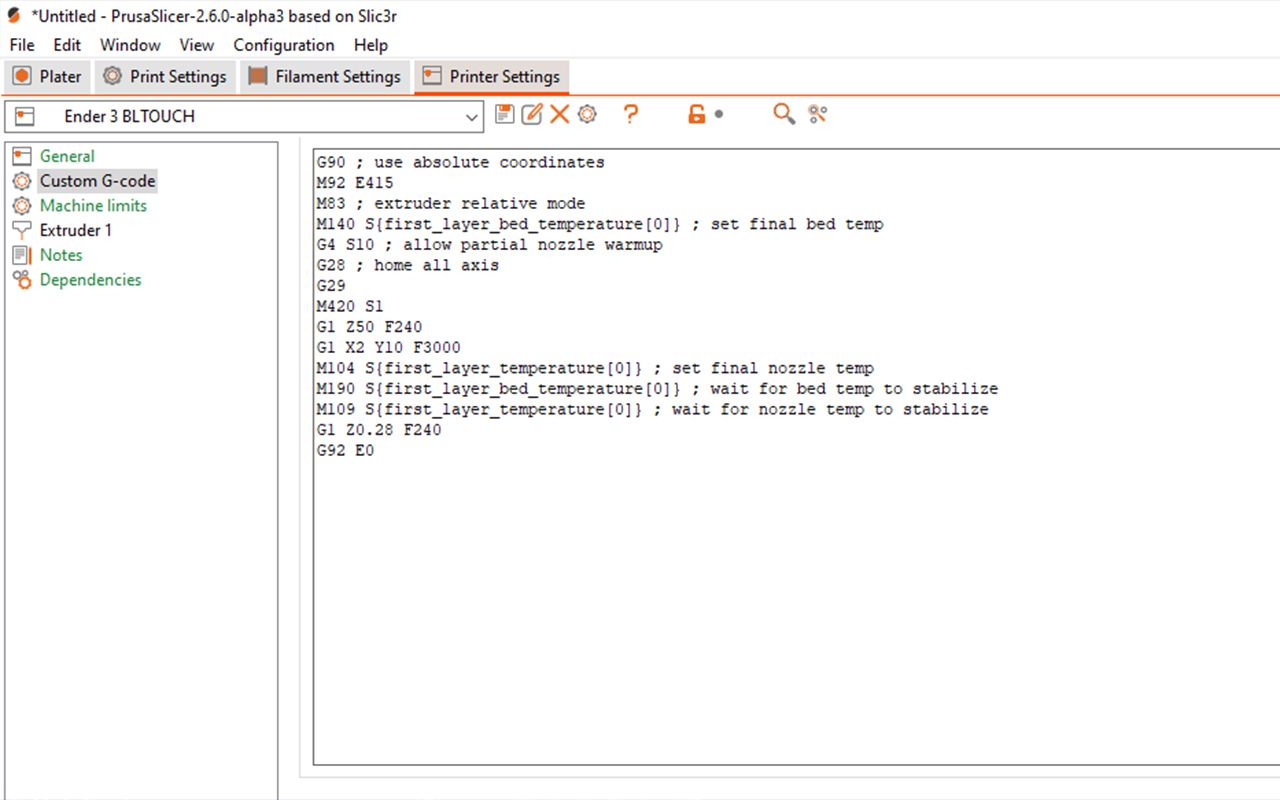
Estepsiä ja oikeastaan kaikkia stepping-arvoja ei tarvitse konfiguroida firmwaressa, voit vain muokata käynnistysgcodea lisäämällä uuden arvon M92-komennolla. Tämä on helpoin tapa, kun päivität ekstruuderiasi, sinun ei tarvitse päivittää firmwarea useimmissa tapauksissa, voit vain käyttää gcodea joko slicerissäsi tai Pronterfacen kautta, kuten olemme jo osoittaneet. Tämä voidaan itse asiassa tehdä kaikille liikeasetusten luokan arvoille, joissa M203 on maksimisyöttönopeus, M201 maksimikiihtyvyys, m204 oletuskiihtyvyys ja M205 nykäysasetukset. Jos esimerkiksi haluat muuttaa ekstruuderin askeleet uudelle Bondtechin ekstruuderille, sinun tarvitsee vain kirjoittaa M92 E415 käynnistys-Gkoodiin (M92 on komento moottorin askeleiden muuttamiseksi ja E osoittaa, että kyseessä on ekstruuderin moottori), siinä kaikki. Nämä arvot eivät siis ole kiveen hakattuja, ja niitä voidaan muuttaa melko helposti muuttamatta firmwarea.
Sivumennen sanoen, jos olet kiinnostunut gcode-komennoista yleensä ja niiden kanssa käytettävistä parametreista, voit tutustua Marlinin sivustoon, jossa on luettelo kaikista gcode-komennoista, joista osa saattaa olla hyvinkin hyödyllisiä. Tässä on esimerkki M204:n laukaisukiihdytyksen gcode.
Jerk on toiminto, joka rajoittaa akselin kiihtyvyyden muutosnopeutta, erityisesti silloin, kun tulostuspää on paikallaan ja lähtee sitten yhtäkkiä liikkeelle, mutta myös silloin, kun se kääntyy 90 astetta. Se on suhteellisen vanha laiteohjelmiston ominaisuus, jota monet tulostimet käyttävät edelleen, mutta uudemmat tulostimet, erityisesti Klipper-ohjelmistolla varustetut tulostimet, käyttävät jotain nimeltä jerkkipoikkeama, joten tarkastellaan sitä.
Ohjelmistomuutokset ovat hyvin yksinkertaisia: siirry riville 1288 ja määritä junction deviation. Varmista myös, että classic_jerkiä ei ole määritelty rivillä 1265 (configuration.h). Firmware-osio on valmis, mutta sinun on vielä selvitettävä junction deviation -arvon arvo. Oletusarvo on 0,013 mm, mutta se riippuu täysin tulostimestasi. Onneksi se on yksinkertainen testi, meidän tarvitsee vain tulostaa malli, jossa jokaisella kerroksella on hieman erilainen liitospoikkeaman arvo, ja sitten tarkistaa, mikä kerros tulostuu parhaiten. Jos huomaat paljon rengastusta, arvo on liian korkea. Sen ei kuitenkaan pitäisi olla myöskään liian alhainen, koska se hidastaisi prosessia.
TeachingTechillä on hyvä opas ja laskin.
Seuraavana on S-käyrän kiihdytys rivillä 1301 (configuration.h), joka vähentää tärinää ja on nykäysfunktion tavoin suhteellisen vanha ja se on siirretty hyllylle uusien toimintojen hyväksi. Yksi näistä on Linear Advance, mikä se on? No, sitä käytetään suulakepuristetun tilavuuden nopeuden ohjaamiseen kiihtyvyyden muuttuessa. Oletko koskaan huomannut 90 asteen kulmia tulostettaessa, että tuloste kaartuu hieman sinne tänne? Linear Advance on suunniteltu juuri tämän korjaamiseen.
Ohjelmiston kannalta se on samanlainen kuin Junction Deviation. Mene configuration_adv.h-tiedoston riville 2205, niin löydät sen (configuration_adv.h). Sinun tarvitsee vain poistaa kommentti, jotta se on määritelty. Sitten sinun on kalibroitava se oikean arvon löytämiseksi. Kutsumme sitä k-arvoksi, oletuksena se on 0,22.
K-arvon kalibrointi on samanlaista kuin Junction Deviation -arvon kalibrointi, tulostamme jotain eri arvoilla ja katsomme, mikä toimii parhaiten. Onneksi Marlinissa on aivan loistava laskuri, jonka avulla voit selvittää kaiken.
13. Z-anturi, sängyn tasaaminen, moottorin pyörimissuunnan muuttaminen
Rivillä 1311 tullaan sängyn tasaamiseen ja Z-antureihin (configuration.h). Tämä on hyvin laaja osio, sillä tasaukseen on monia eri menetelmiä, ei vain automaattisen tasauksen lisäosia vaan myös paljon muuta. Jos haluat lukea BLTouchin tai vastaavien laitteiden firmwaresta, suosittelen TeachingTechin videota, jossa kerrotaan BLTouchin saamisesta toimimaan käytännössä missä tahansa laitteessa.
Tarvitseeko sinun kääntää moottorin suunta? Joskus tämä on tarpeen ekstruuderin päivittämisen tai askelmoottoriohjaimen vaihtamisen vuoksi. Marlinissa on monia toimintoja, jotka vaativat suunnan kääntämistä, mutta sinun ei tarvitse tehdä sitä nyt. Kun käännät ja flashaat laiteohjelmiston, kokeile vain moottorin liikuttamista ja katso, kulkeeko se oikeaan suuntaan. Jos haluat muuttaa suuntaa, siirry riville 1698 ja muuta INVERT_[X/Y/Z]_DIR arvoksi false tai true
14. Sängyn koon ja filamentin kulumisen tunnistimet
Jatkossa rivillä 1753 (configuration.h) on vuorossa vuoteenkoko. Vuoteissa pitäisi olla hieman liikkumavaraa, koska emme halua mallimme tulostuvan liian lähelle vuoteen reunaa, joten voimme asettaa min_position arvoksi 0, joka on kohta, jossa päätepysäytys tai anturiton homing pysäyttää tämän akselin automaattisen homingin yhteydessä. Ehkä päätepysäytyspiste on jo kohtuullisen matkan päässä sängyn reunasta, tai ehkä se ei ole edes sängyllä. Tässä tapauksessa tarvitset välystä, joten muokkaa min_position arvoa millimetreinä siten, että se sisältää välyksen, ja siirrä sitten vaunu sängyn vastakkaiselle puolelle pisteeseen, jota et halua sen menevän pidemmälle, ja se on max_position arvosi, joka on piste, johon kaikki liikkuminen on rajoitettu.
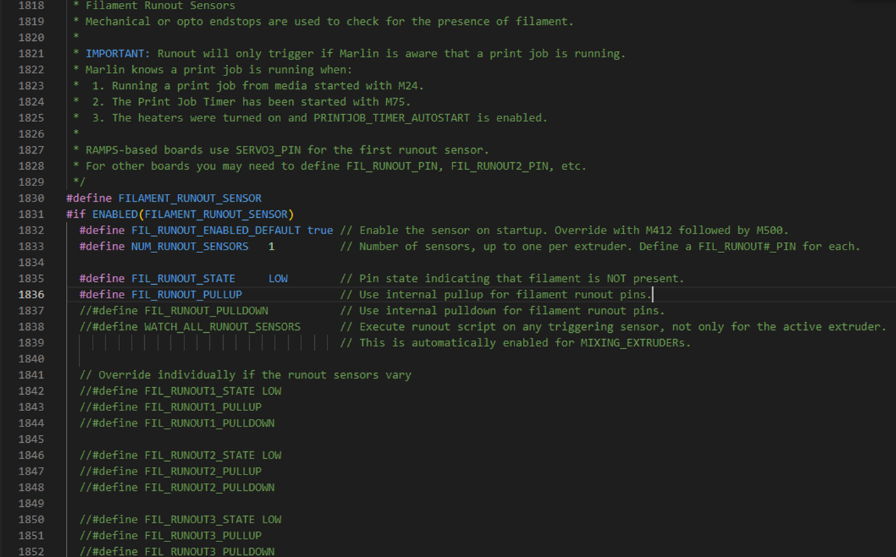
Seuraavana ovat filamentin kulkuanturit rivillä 1818 (configuration.h). Helpoin tapa asettaa runout-anturi on käyttää tavallista päätepysäytintä, jonka päässä on pieni rulla. Tämä rulla on melko tärkeä, koska jos filamenttia vedetään ulos, metalliliuska taipuu tai jopa katkeaa, jolloin kytkin on käyttökelvoton tai epäluotettava. On olemassa muitakin vaihtoehtoja, kuten optoanturi, joka on mielestäni paljon luotettavampi. Minulla ei ole koskaan ollut ongelmia Prusa MK3:n anturin kanssa, mutta päätepysäytysanturit on helppo lisätä, ne ovat halpoja ja oikealla suunnittelulla ne voivat toimia erittäin hyvin. Joten jos haluat käyttää sellaista, poista kommentti filament_runout_sensor riviltä 1830, sinulla pitäisi olla #define FIL_RUNOUT_ENABLED_DEFAULT käytössä ja asetettu true:ksi, ja tarvitset vain yhden, paitsi jos sinulla on kaksoissekstruuderi, joten aseta #define NUM_RUNOUT_SENSORS arvoksi 1, sinulla pitäisi ehdottomasti olla M600-komento käytössä (lisää siitä hieman myöhemmin), joten vaihda riville 1877 (configuration.h).
Sinun on myös mentävä ADVANCED_PAUSE_FEATURE riville 2752 (configuration_adv.h) ja poistettava kommenttimerkki. Täällä on paljon muitakin hienosäätöjä, joita voit tehdä, ja Marlin on laittanut niiden viereen erittäin hyödyllisiä, helposti ymmärrettäviä kommentteja. Muuta niitä parhaaksi katsomallasi tavalla ja sovita ne tulostimellesi sopiviksi
Muuten sinun ei tarvitse enää tehdä kuin kytkeä piirilevy. Lautastasi riippuen voit myös muuttaa sitä, jos haluat. Voit tarkistaa, missä oletusnasta on, menemällä SRC, PINS ja prosessorisi malli, valitse se ja paina CTRL F ja kirjoita FIL_RUNOUT_PIN, meille BTT SKR e3 Mini V3.0:ssa nasta on PC15, mene Googleen ja kirjoita piirilevysi nimi ja pinout-kaavio ja katso, missä tuo nasta on.
15. M600
Olemme jo maininneet M600-komennon. Se on valitettavan vähän käytetty mutta erittäin hyödyllinen laiteohjelmiston ominaisuus, nimittäin filamentin vaihtaminen tulostuksen aikana. Jos haluat tulostaa ensimmäiset kerrokset yhdellä värillä, seuraavat toisella värillä ja vaihtaa sitten jatkuvasti väriä, voit tehdä sen tällä toiminnolla. Katso tätä merkkiä, jonka teimme M600-komennolla.

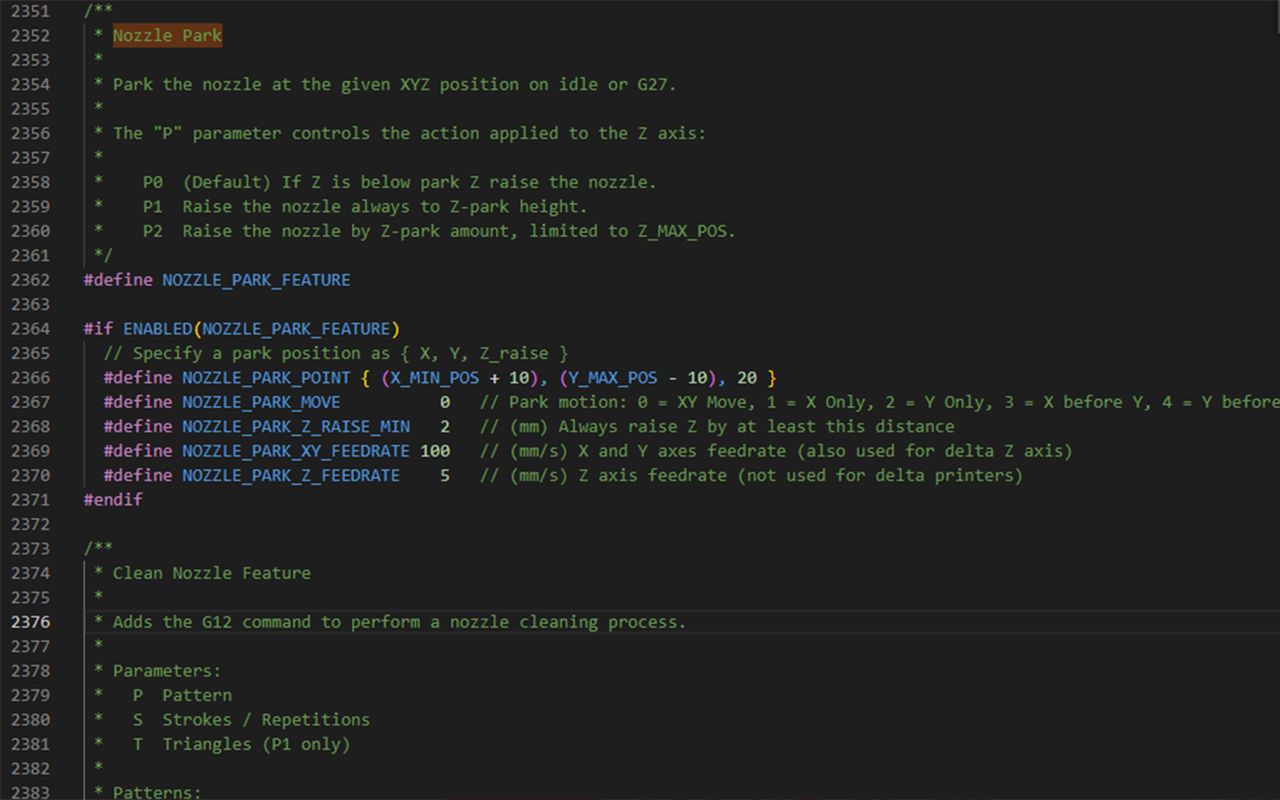
Olemme siis jo ottaneet käyttöön M600:n ja kehittyneen taukotoiminnon, nyt meidän on otettava käyttöön tulostuspään pysäköintitoiminto. Mene siis riville 2362 (configuration.h) ja aktivoi "nozzle park". Voit halutessasi muuttaa asentoa tässä ja myös nopeutta kohdissa "feed rate" ja "minimum z feed rate"
Mene nyt riville 824 ja ota käyttöön Extrude max length (configuration.h). Tämä vetää uutta filamenttia tähän pituuteen asti, mikä riittää poistamaan vanhan filamentin ja muuttamaan värin kokonaan. Tämä arvo riippuu siitä, onko sinulla Bowden-kaapeli vai Direct Drive. Jos käytössäsi on Bowden-kaapeli, jossa on pitkä PTFE-putki, tämän arvon on oltava melko korkea, jos käytössäsi on Direct Drive, se voi olla alhainen
Sitten palaa takaisin Configuration_adv.h:ssa olevaan kehittyneeseen taukotoimintoon ja varmista, että PARK_HEAD_ON_PAUSE on poistettu kommentoimatta, jotta suutin pysäköidään vastaavasti (configuration_adv.h)
16. Lisätoiminnot - EEPROM, esilämmitysasetukset, suuttimen puhdistus, salasanat, kieli, kooderin herkkyys, nestekidenäytöt, neopikselit
Seuraavana on EEPROM rivillä 2291, ja se pitäisi ehdottomasti ottaa käyttöön (configuration.h) - se on kuin tulostimesi muistitoiminto. Jos siis muutat jotain, periaatteessa mitä tahansa Gcode-komennolla, voit tallentaa sen M500-komennolla ja se säilyy. Ilman tätä ominaisuutta tulostin vain käynnistyy uudelleen tietokoneen firmware-asetuksilla. Tämä tekee siitä todella kätevää.
Seuraavana ovat esilämmitysvakiot rivillä 2335 (configuration.h). Kuten EEPROM:n kohdalla, niiden pitäisi olla siellä oletuksena, vaikka joskus arvot eivät olekaan niin suuria. Pidän siitä, että nämä arvot ovat hieman korkeammat kuin todellinen tulostuslämpötila, mutta se on vain pieni asia. Oletusarvoisesti vain PLA- ja ABS-lämpötilat on esiasetettu, mutta jos et oikeastaan käytä mitään niistä tai tarvitset paljon esiasetuksia, voit lisätä jopa 10.
Seuraavana on clean nozzle -toiminto rivillä 2374 (configuration.h). Tämä on hyödyllinen kahden ekstruuderin tulostimessa, mutta se voi olla hyödyllinen myös yhden ekstruuderin tulostimessa, jos haluat, että ensimmäinen kerros on täydellinen.
Seuraavana on salasana rivillä 2498 (configuration.h) - et ehkä halua, että esimerkiksi lapsesi tai kämppiksesi:sisällä olevat, jotka eivät tunne rajoja, voivat käyttää tulostinta. Salasanasuojaus voisi olla siinä tapauksessa hyödyllinen, mutta jos olet ainoa, jolla on pääsy tulostimeen, salasana on oikeastaan turha.
Seuraavana on salasana rivillä 2498 (configuration.h)
Meillä on myös LCD-tuen asetukset rivillä 2529 (configuration.h). Jos englanti tai kiina ei ole äidinkielesi, se ei ole ongelma, sinulla on tässä muutamia valittavana. Jos ohjaimesi käyttää enkooderipyörää, voit muuttaa herkkyyttä rivillä 2602 (configuration.h). Alempana ohjaimen asetuksissa voit valita ohjaimesi, ehkä sellaisen, jossa on SD-korttituki tai sellainen, jossa on kosketusnäyttö.
Voit myös päivittää tulostimesi neopikseleillä, jotka ovat ledejä, jotka voit liittää tulostimeen parempaa valaistusta tai hienoa valoshowta varten. Löydät nämä asetukset riviltä 3450 (configuration.h)
Loppujen lopuksi on uusi ja erittäin hieno ominaisuus nimeltä Input Shaping. Tämä on Marlinin uusi ominaisuus, joka voi kompensoida värähtelyjä, jotka voivat aiheuttaa rumia vikoja tulosteeseen. Olemme jo luoneet videon ja oppaan, jotka auttavat sinua sen käyttöönotossa.
Tämä luettelo ei suinkaan kata kaikkea, vaan antaa vain yleiskuvan siitä, mitä muutoksia usein tehdään yleisesti. Jos sinulla on ongelmia jonkin Marlinin laiteohjelmiston tietyn osan kanssa tai haluat, että tätä luetteloa laajennetaan, kerro meille. Laajennamme tätä opasta tulevaisuudessa auttaaksemme sinua kaikissa haluamissasi muutoksissa.
Viimeksi arvostellut
-

Fixman Tarranauhalliset kaapelinsiteet, 10 kpl., 150 mm, musta (10 Kpl)
- Valmistettu nailonista
- Voidaan käyttää useita kertoja
- Silmukoilla
-

-

-

3DJAKE Isopropyylialkoholi, 1 l
- Isopropyylialkoholi 99,9%
- Todella tehokas
- Hyvät puhdistusominaisuudet
Uusimmat artikkelimme:
Tutustu kauppaan 3DJake:
-
Suomi: ilmainen toimitus
alkaen 99,00 € -
Ilmainen
palautuslähetys Yli 8.850 tuotetta
Turvallinen maksu
SSL-suojauksella
